
Vészhelyzeti pályatervezés kooperáló autonóm járművek számára
Támogató
Projektadatok
Vezető részleg
A napjainkban egyre inkább kutatási fókuszba kerülő autonóm járművek fejlesztésének egyik sarokköve, hogy a jármű irányítórendszere képes legyen a környezet statikus és dinamikus objektumait is figyelembe véve megtervezni jármű pályáját. A környezetérzékelés alapját különböző elven működő szenzorok adják, mint például az ultrahang, radar, lidar, vagy a gépi látáson alapuló kamerás rendszerek.
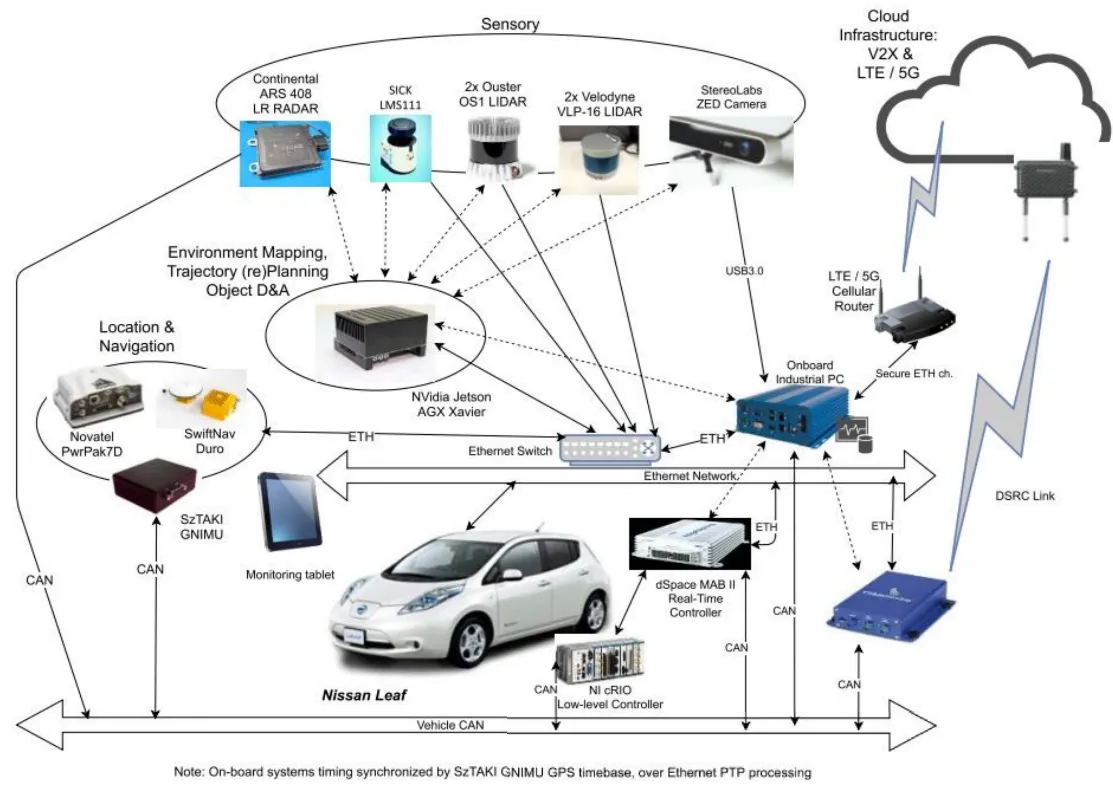
Ezen rendszerek információinak egységes kiértékelését egy magas szintű környezetérzékelő rendszer végzi, amelyre alapozva az optimális járműpálya meghatározható az autonóm jármű számára. A jármű mozgási pályájának tervezése tulajdonképpen egy optimalizálási probléma megoldása, melynek során mindig figyelembe kell venni a trajektória dinamikai megvalósíthatóságát, azaz a menetstabilitását garantálását.
A kutatás célja
A kutatás elsődleges feladata vészhelyzeti manőverezés gépi tanuláson keresztül való módszereinek kísérleti fejlesztése kooperálni képes autonóm járművek számára, melyet egy konkrét vészhelyzeti eset valós környezetben történő tesztelésén keresztül mutatnánk be.
Résztvevők
A vietnámi partner-intézmény: Közlekedési és Kommunikációs Egyetem
