
Instant környezetmegfigyelés mobil járművekről térinformatikai adatbázis háttérrel
Támogató
Vezető részleg
A projekt fő célja az instant autós érzékelés és a térinformatikai rendszerekben található információk együttes kiaknázásának támogatása olyan új algoritmikus eszköztárral, amely lehetővé teszi, hogy az önjáró autók valós időben, döntésük előkészítéséhez juthassanak releváns információhoz a korszerű térinformatika (GIS) rendszerekből, valamint lehetőség legyen a forgalomban szereplő járművek szenzoradatait a GIS rendszerek bővítéséhez és frissítéséhez felhasználni.
A projekt háttere
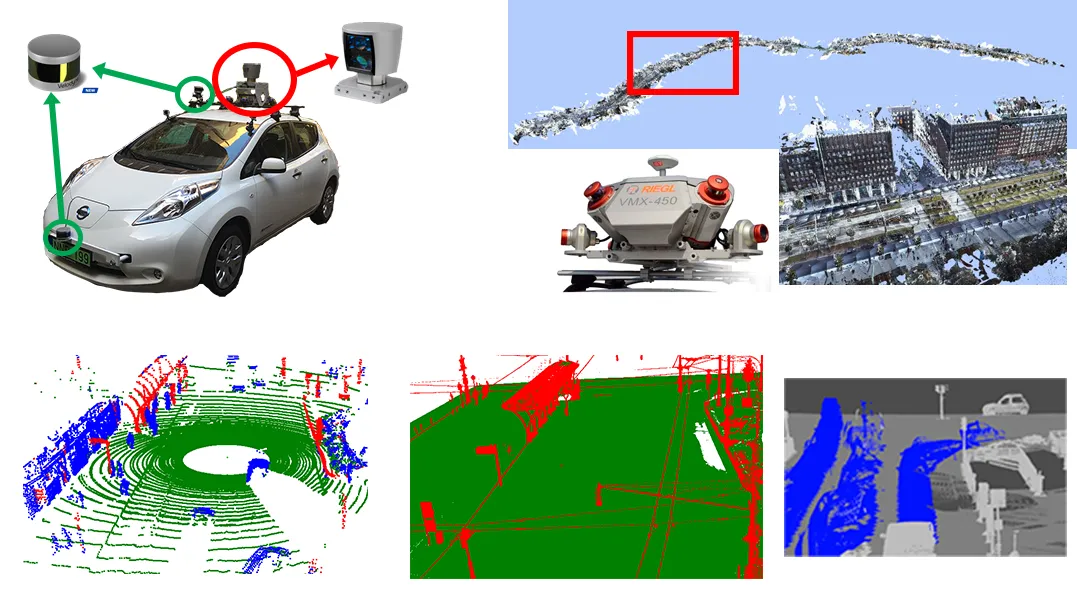
Napjaink korszerű érzékelői forradalmasították az információgyűjtést. Az önjáró autók látórendszerei a járművek navigációhoz szükséges tájékozódásán kívül lehetőséget adnak a környezet valós idejű feltérképezésére, statikus (jelzőtáblák, távvezetékek, növényzet, utcabútorzat) valamint dinamikus környezeti elemek (járműforgalom, tömeg-csoportosulások, szokatlan események) észlelésére és felismerésére. Azonban míg a fedélzeti 3D érzékelők - Lidar lézerszkennerek, kalibrált kamerarendszerek és navigációs szenzorok - nagy időbeli felbontású méréssorozatokat rögzítenek, korlátozott a térbeli felbontásuk. Emellett a 3D környezetben fellépő takarási jelenségek és a jármű haladási sebességből adódó rövid megfigyelési idők is limitálják a kizárólag fedélzeti mérések útján kinyerhető környezeti információ mértékét és minőségét.
Az újgenerációs térinformatikai rendszerek (GIS) rendkívül nagy térbeli részletezettségű háromdimenziós térképet tárolnak a városról sűrű 3D pontfelhők, és tájolt fényképek, valamint szemantikai metaadatok formájában. Ugyanakkor kihívások itt is megjelennek, főként a térfelmérések magas költségével, a nagy adatmennyiség gazdaságos kiértékelésével, gyors lekérdezhetőségével és az adatbázisok frissítésével kapcsolatban.
Projekt várható eredményei
A projekt megcélzott eredményei főként publikációk létrehozása, tudományos utánpótlásnevelés támogatása, és a tudományos eredmények gyakorlati hasznosulásának előkészítése.
A munkához kapcsolódó eddig megjelent fontosabb publikációk:
- Cs. Benedek, B. Gálai, B. Nagy and Z. Jankó: ”Lidar-based Gait Analysis and Activity Recognition in a 4D Surveillance System,” IEEE Trans. on Circuits and Systems for Video Technology, vol. 28, no. 1, pp. 101-113, 2018, IF: 3.599*

- Cs. Benedek: "An Embedded Marked Point Process Framework for Three-Level Object Population Analysis", IEEE Trans. on Image Processing, vol. 26, no. 9, pp. 4430-4445, 2017, IF: 4.828*
-
A. Börcs, B. Nagy and Cs. Benedek: "Instant Object Detection in Lidar Point Clouds", IEEE Geoscience and Remote Sensing Letters, vol. 14, no. 7, pp. 992 - 996, 2017, IF: 2.761*
a kiadvány címlapján megjelent cikk
-
Eichhardt, I., Chetverikov, D. and Z. Jankó, "Image-guided ToF depth upsampling: a survey", Machine Vision and Applications, vol 28, no. 3-4, pp. 267–282, 2017
Egyetemi hallgatók bevonása a tudományos munkába:
- 2 PhD hallgató,
- 4 MSc hallgató
OTKD eredmények:
- két I. helyezés a 2017-es OTDK-n (Gálai Bence és Zsámboki Richárd)
Megjelenés ipari kiállításokon:
- FMX demo - i4D filmelőkészító rendszer
- Élő Lidar-demo a Frankfurti Autószalonon


