
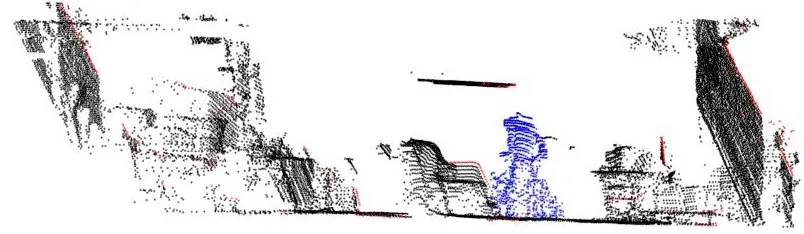
Exploration of the environment in dynamic scenery from partial views
Project website
Sponsor
OTKA NKFIH
Project data
Cost
35.516mFt
Founded %
100
Department in charge
Recent Simultaneous Localization and Mapping (SLAM) algorithms are basically developed for stable environment in time; dynamic scenes cause strong bias in the localization models. For this reason we will improve the conventional SLAM calculus with statistical optimizing the models of changing parts and their neighborhood connection; this will result in semantic connectedness investigation on the models, which needs good classification methods of the scalable cluster structure.
Coordinator
Szirányi Tamás




